- Tue 20 May 2014
- Publication
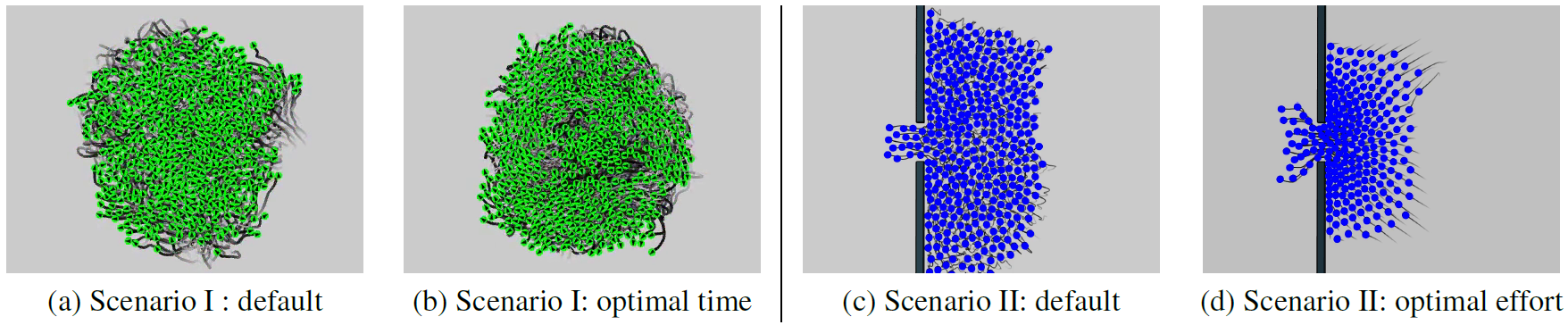
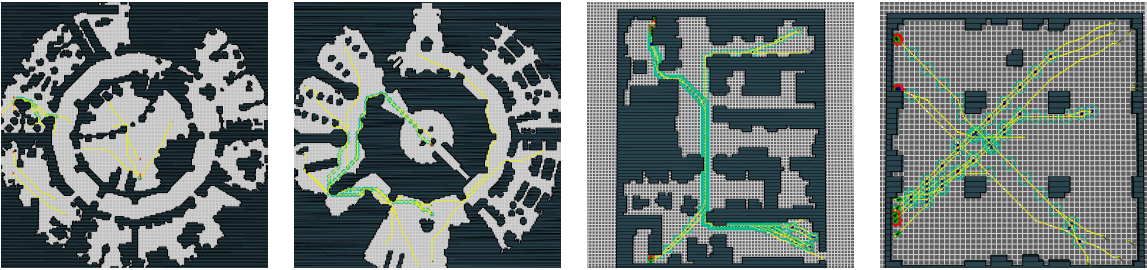
Robust Space-time Footsteps for Agent-based Steering
Glen Berseth  Randomized, continuous footstep action space. |  Geometric validation to ensure valid configuration. |
With this work we build upon prevous work to inductavely design a robust footsteps-based steering algorithm. The steering algorithm uses an A* algorithm to generate least cost footstep plans between goals while avoiding dynamic collisions.